 |
 |
BOD - Das Digitale Betragsoptimum |
Der Grundgedanke des Betragsoptimums, das ursprünglich für
kontinuierliche Systeme hergeleitet wurde, ist näherungsfrei
und in geschlossener Form für diskontinuierliche Systeme
formulierbar. Damit kann bei betragsoptimaler Einstellung digitaler
Regelkreise generell auf die Anwendung von Näherungsmethoden
verzichtet werden:
Unter MATLAB steht eine Toolbox BOD mit
m-Files sowie Demo's als Freeware bereit:
aktuelle >>>Version 3.1<<<
bzw. ältere Versionen
Die Versionen unterscheiden sich in folgenden Punkten von
Version 1.0:
- Wahlweise Ein- / Ausgabe von Übertragungsfunktionen in LTI-Syntax.
- Wahlweise vektorgesteuerte Optimierung mit wahlweiser Abschaltung von
Rückmeldungen.
- Überarbeitete Berechnung von Kaskadenstrukturen. Bei Anpassung an die
Syntax können neben Endlicher Einstellzeit und Digitalem Betragsoptimum
auch andere Optimierungsverfahren verwendet werden.
- Wesentlich erweiterte Demo's mit SIMULINK Simulation.
- Einführung von private- und DEMO-Direktory sowie content File.
- V.2.3: Einführung Englischer Hilfetexte (help).
- V.2.4: Die neue Funktion "bod_gen.m" verwendet generell direkt das BOD
Grundgleichungssystem zur Optimierung, um Regler der PID-Familie,
verwandte Regler und Lead/Lag Regler zu berechnen. Hierin besteht ein
wesentlicher Unterschied zur Funktion "bod.m" die auf Umformungen des
BOD Grundgleichungssystems basiert.
- V.2.5: Die neue Funktion "gmt.m" erlaubt die Berechnung von gewichteten
mittleren Totzeiten bei Einsatz von Bussystemen innerhalb der Regelschleife;
Die Unterdirektorie "SYMDEF" ermöglicht die symbolische Definition von
Regler und Strecke, mehrere Beispiele mit Definitionen und Simulink-Modellen
veranschaulichen die Anwendung.
- V.2.8: Anpassung an veränderte Syntax für fsolve
- V.2.9: nargchk entfällt zukünftig, Ersatz durch narginchk
- V.3.0: Neue Funktion "bod_rst.m" mit Beispiel "demo_BOD_rst.m"
- V.3.1: Neue Funktion "bod_prefi_opt.m" mit Beispielen "bod_prefi_opt_check01_..."
bis "bod_prefi_opt_check05_..." zur hybriden Optimierung, d.h. Reglereinstellung
bewirkt Verhalten für verzögerte Eingangsgrößen, Einstellung des Vorfilters
bewirkt Verhalten für unverzögerte Eingangsgrößen
Allgemeine Vorteile des Betragsoptimums - bereits verfügbar
für kontinuierliche Systeme:
- Geringe Stellgliedbeanspruchung
- Relativ geringe Parameterempfindlichkeit
- Einfache Regler- und Parameterberechnungsgleichungen
- Einfache Modelle für unterlagerte, geschlossenen Regelkreise sind
praktikabel
- Relativ geringer Unterschied im Führungsverhalten zwischen unverzögerten
und verzögerten Eingangssignalen mit vorgeschaltetem Filter
- Zielt auf geeignete Formung des anschaulichen Zeitverhaltens - damit
praktisch interessanter als z.B. Polvorgabe
- Anwendbar auf Zustandsregelungen durch Berechnung über
Ausgangsgleichungssystem
Weitere Vorteile des Digitalen Betragsoptimums (BOD) zur Berechnung
diskontinuierlicher Regler:
- Einsetzbar für beliebige Relationen zwischen Abtastzeit
und Streckenzeitkonstante
- Einfache Berücksichtigung von ganzzahligen und nichtganzzahligen
Totzeiten
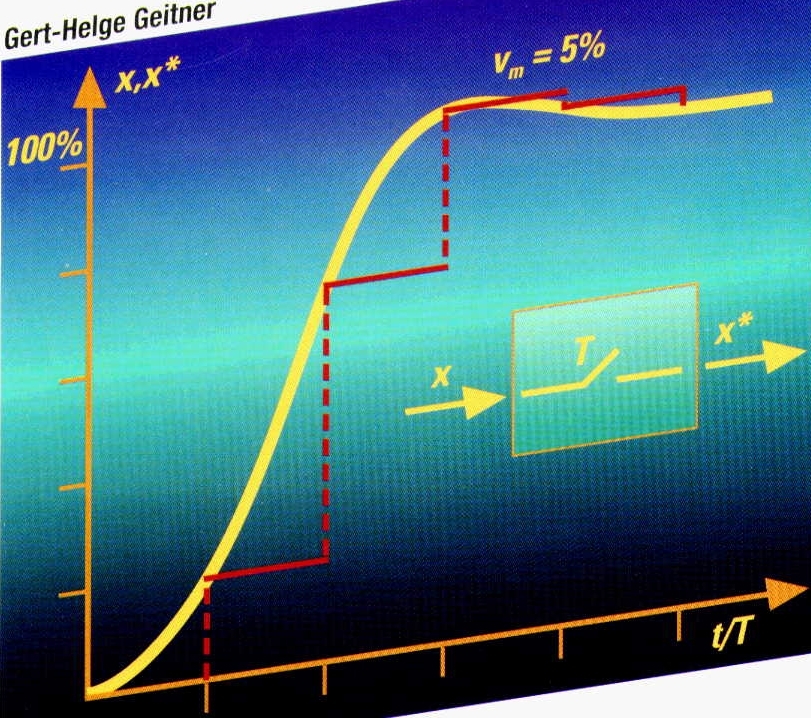
- Einfache und genaue Berücksichtigung von Mittelwertmessungen
- Einfache Berücksichtigung von Stellgliedmodellen auf
Abtasterbasis
- Keine Notwendigkeit zur Definition einer Summenzeitkonstante
bzw. zur Nichtkompensation der kleinsten Zeitkonstante, um einfache
Ergebnisse zu erhalten
- In bestimmten Fällen für nichtminimalphasige Strecken
einsetzbar
- Eine Verstärkungsreduktion auf 2/3 erweist sich meist
als günstiger Anfangswert für eine aperiodische Einstellung
bei unverzögerten Eingangsgrößen
- Übersichtliche Berechnung von Zustandsregelstrukturen
- Direkter Entwurf digitaler Regler ausgehend von leistungsflussorientierten
Streckenmodellen
Wie für kontinuierliche Systeme gilt:
- Einsetzbar für Kaskaden- und Zustandsregelstrukturen
- Anwendbar bei unverzögerten und verzögerten Eingangssignalen,
d.h. das sogenannte Symmetrische Optimum ist eingeschlossen.
- Typische Reglerstrukturen bei Kaskadenstruktur sind: P-, I-, PI-, PD-,
PID-Regler
- Eine Kompensation von Streckenpolen kann bei Bedarf erfolgen
Die Ergebnisse sind sowohl für maschinelle Berechnungen,
als auch für Berechnungen von Hand bzw. on-line Adaption
aufbereitet - siehe Literaturstelle. Maschinelle Berechnung der
Reglerparameter und Z-Transformation der Strecke erfolgen günstig
mit einem Mathematikprogramm-Paket wie z.B.
MATLAB
.