 |
 |
BOD - The Digital Magnitude Optimum |
The Magnitude Optimum was deduced for continuous systems
originally. The basic idea is to achieve as large frequency range
of closed loop gain identically to unity as possible. This aim
may be mathematically defined for discontinuous systems likewise
avoiding any approximation and defining a closed formula. Thus
the use of the Digital Magnitude Optimum generally makes it possible
to avoid quasicontinuous methods for optimization of discontinuous
control loops based on the Magnitude Optimum:
Applying MATLAB - freeware toolbox BOD is at
disposal containing m-files and demo's:
current >>>Version 3.1<<<
The versions differ in following features to
version 1.0:
- Optionally use of LTI syntax to input / output transfer functions instead
of numerator / denominator polynomials.
- Optionally control vector-driven optimization instead of menu-driven
operation and optionally switch-off of messages.
- Revision of cascaded control structure computations. In addition to
Digital Magnitude Optimum and Finite Time Settling another optimization
rules may be applied if syntax is matched to.
- More comprehensive demo's including Simulink simulations.
- Introduction of directories "private" and "demo" as well as of a content
file.
- V.2.3: complete English help.
- V.2.4: New function "bod_gen.m" generally applies the basic BOD optimization
equation system directly to compute PID-type family, similar and lead / lag
controllers. This is an essential contrast to function "bod.m" which
is based on reconfigurations of the BOD optimization equation system.
- V.2.5: New function "gmt.m" enables computation of weighted mean dead times
in case of application of bus systems within control loops; subdirectory
"SYMDEF" offers symbolic definition of controller and plant, several examples
examplify application via definitions and Simulink models.
- V.2.8: tuning for modified fsolve syntax
- V.2.9: nargchk obsolete, replaced by narginchk
- V.3.0: new function "bod_rst.m" and example "demo_BOD_rst.m"
- V.3.1: new function "bod_prefi_opt.m" with examples "bod_prefi_opt_check01_..."
till "bod_prefi_opt_check05_..." for hybrid optimization, i.e. controller
settings cause behaviour for delayed inputs, settings of prefilter cause
behaviour for undelayed inputs
General advantages of the Magnitude Optimum - already available
for continuous systems:
- Low stress of the electric actuator
- Relatively low parameter sensitivity
- Easy equations to calculate the parameters of the controller
- Feasible easy models of inner closed control loops
- Little difference only between the step response behaviour
regarding undelayed signals and delayed input signals
including pre-filters
- Aimed to an influence on the clear time behaviour, therefore
practically more interesting in comparison to pole placement
- Applicably for state control structures via use of the basic
equation system
More general advantages only available applying the Digital Magnitude
Optimum for discontinuous systems:
- Valid regarding any relation of sampling time and time constants of the
controlled process
- Easy consideration of whole-number and not whole-number dead times
regarding structure and dimensioning of the controller
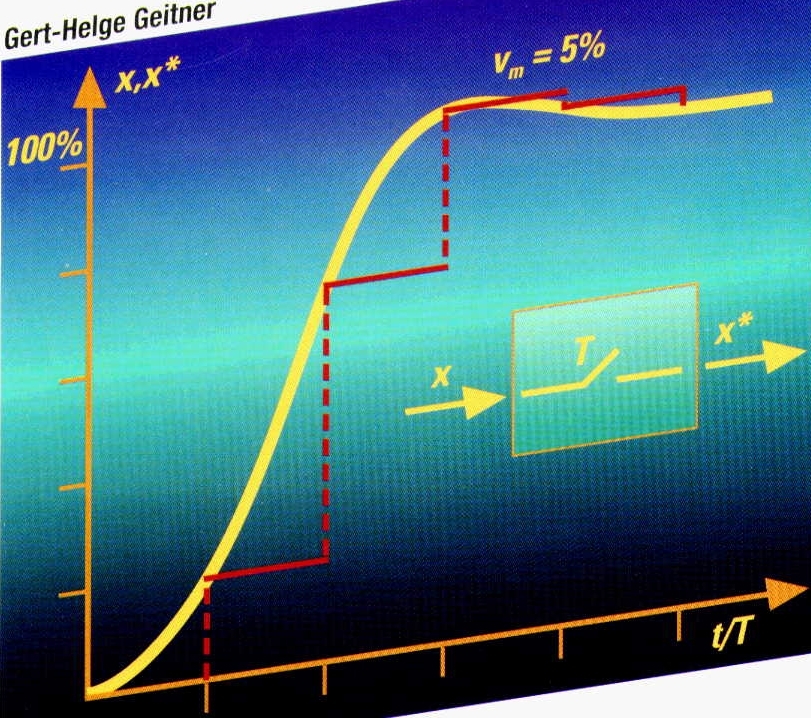
- Easy consideration of mean value measurements of controlled variables
without any approximation
- Easy consideration of models of actuators based on samplers regarding
the innermost loop
- Not any longer the need for a definition of a sum of the parasitic
time constants resp. for a non-compensation of the smallest time
constant to get easy results
- Practicable on not minimal-phase systems in particular cases
- Gain reduction to 2/3 proves to be a successful starting point for
an aperiodic adjustment regarding undelayed input signals in
particular cases
- Calculation of the intended delay of a derivative component in
particular cases
- Direct digital control design based on power flow oriented plant models
As valid for continuous systems it is valid for discontinuous
systems likewise:
- Applicable for cascaded and state control structures.
- Applicable for undelayed and delayed input signals, latter with
pre-filter, thus the so-called symmetrical optimum is included.
- All typical controller types of the PID-family are included:
P, I, PI, PD, PID.
- Compensation of stable poles is possible if desired.
The results of the Digital Magnitude Optimum are prepared as well as
for computer-aided and manual use - see book above. The latter
reconfigurations are an important base for on-line adaptation
algorithms also. Computer-aided computations of z-transformed plants
and controller parameters advantageously may be executed via
mathematical software packages like MATLAB,
for instance using above mentioned toolbox BOD.